HTV-1
HTV-1, 또는 HTV 기술 실증기(일본어: HTV技術実証機, 영어: HTV Technical Demonstration Vehicle)은 일본 우주항공연구개발기구가 2009년 9월 11일 쏘아올린 첫 번째 우주 스테이션 보급기(HTV)이다. 9월 17일 국제우주정거장에 도킹해 물자를 수송한 후, 10월 30일에 국제우주정거장에서 분리하여 11월 2일 대기권에 재진입하여 분해되었다. HTV의 애칭이 결정된 후엔 고노토리 초호기(こうのとり初号機), 고노토리 1호기(こうのとり1号機)라고도 불린다.
|
HTV 기술 실증기 HTV技術実証機 | |
 국제우주정거장과의 도킹을 진행하는 HTV-1의 모습. | |
| 임무 정보 | |
|---|---|
| 관리 기관 | 일본 우주항공연구개발기구 |
| 임무 유형 | 국제우주정거장 재보급 HTV 기술 시험 |
| COSPAR ID | 2009-048A |
| SATCAT № | 35817 |
| 발사일 | 2009년 9월 10일 2:01:46 (JST) |
| 발사체 | H-IIB 304 (F1) |
| 발사 장소 | 다네가시마 우주 센터 |
| 임무 기간 | 52일 |
| 임무 종료 | 2009년 11월 2일 6:26 (JST) |
| 우주선 정보 | |
| 제조 기관 | 미쓰비시 중공업 |
| 중량 | 10500 kg 16000 kg (화물 적재 후) |
| 궤도 정보 | |
| 궤도 | 지구 저궤도 |
| 궤도 경사(i) | 51.66° |
| 프로그램 | |
| 소속 프로그램 | 우주 스테이션 보급기 |
| 이후 임무 | HTV-2 |
임무 내용
편집목적
편집HTV-1은 H-IIB를 처음으로 사용한 임무임과 동시에, 국제우주정거장의 보급 물품을 HTV-1로 수송한 임무이다. 또한 아래와 같은 기술검증을 진행했다.[1]
- 국제우주정거장에 대한 랑데부기술 검증[1]
- 안전화기술, 관제기술 검증[1]
- 궤도 상의 대형 기체 구조 검증[1]
- 항공전자의 다중화, 약 80만 개의 부품으로 이루어진 추진 장치의 구성 검증[1]
- 국제우주정거장과 도킹시 우주비행사의 탑승을 위한 유인대응설계 검증[1]
탑재품
편집

HTV의 보급량은 최대 6톤이지만, HTV-1은 ISS 도킹 전 운용 검증을 위해 평소보다 더 많은 추진제와 배터리를 탑재했다. 그래서 HTV-1의 보급량은 가압부 3.6톤과 비가압부 0.9톤으로 총 4.5톤이었다.[2][3]
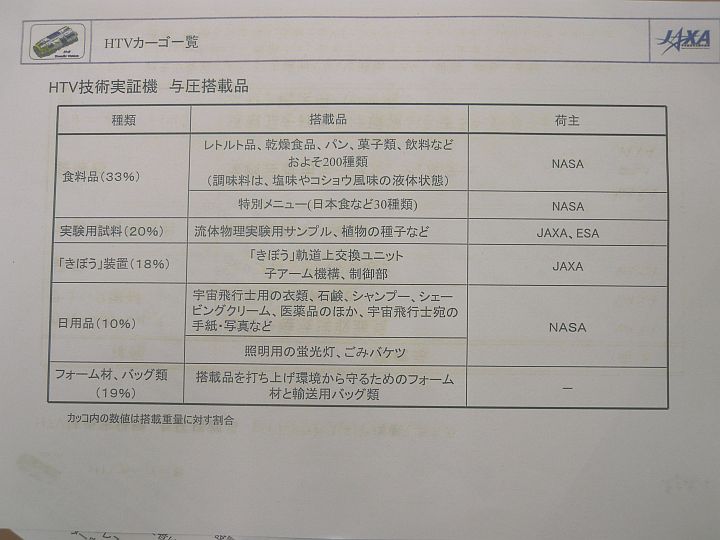
비가압부 보급 캐리어에는 키보 모듈과 초전도 서브 밀리미터파 림 복사 사운더(SMILES, 475kg), 미 항공우주국의 연안해역용 하이퍼 스펙트럼 영상장치, 대기권/전리층 원격감지 시스템 실험장치(HREP, 381kg)를 탑재했으며,[2] 가압부 보급 캐리어에는 HTV보급 랙(HRR)을 7대, 키보 모듈 보관 랙(PSRR)을 1대 탑재하여 내부에는 식량(33%), 과학기술용물자(20%), 키보 모듈의 보조 팔(18%), 의류, 세면용 화장품, 편지, 사진, 형광등, 쓰레기통 같은 크루원용 보급품(10%), 기타(19%)가 실렸다.[2][4]
임무 성공 기준
편집
JAXA는 HTV-1 임무 성공 정도의 기준을 3개로 나눠 판정했다.[5]
- 최소한의 성공 (ミニマムサクセス→Minimum success)
- 궤도 간 수송 기술을 검증하기 위해, HTV-1이 국제우주정거장에 랑데부하고, 국제우주정거장의 로봇 팔이 닿는 거리까지 최종 접근이 가능하며, HTV의 운용 개시에 지장이 없음을 확인하는 것.
- 완전한 성공 (フルサクセス→Full success)
- HTV-1가 국제우주정거장의 로봇 팔에 의해 도킹이 가능한지 확인.
- 국제우주정거장과 도킹한 뒤 보급품을 국제우주정거장에 이송할 수 있는지 확인하는 것.
- 국제우주정거장으로부터 도킹을 해제하고 대기권에 재진입 시켜 안전하게 해상착수되는지 확인하는 것.
- 추가적인 성공 (エクストラサクセス→Extra success)
완전한 성공과 더불어 아래의 조건들 중 어느 하나라도 달성할 경우:
- 실제 운용 결과에 근거하여 남는 성능을 통해 운용기의 능력이 향상될 전망이 나오는 경우.
- 전제된 운용 조건 이외에서의 운용 검증통해, 운용의 유연성을 확대할 전망이 나오는 경우.
운용
편집발사 전
편집4월 22일, HTV-1의 본체(전기 모듈+추진 모듈), 가압/비가압 보급 캐리어, 선외실험장치탑재용 팔레트를 다네가섬 시마마항을 통해 다네가시마 우주 센터에 반입했다.[6]
- 본체: 외관점검(4/25), 적합성시험(5/23 ~ 5/26), 무게중심측정(5/29 ~ 6/2)[6]
- 가압 보급 캐리어: 전방추진계점검(5/4 ~ 5/7), 랙 탐재(5/11 ~ 5/20), 해치 패쇄(5/27), 중량중심측정(6/2 ~ 6/4)[6]
- 비가압 보급 캐리어: 외관점검(4/28 ~ 4/29), 컨트롤러 점검(5/21 ~ 5/25), 선외실험장치탑재용 팔레트 탑재(5/25 ~ 5/28), 중량중심측정(5/27 ~ 6/1)[6]
- 선외실험장치탑재용 팔레트: 선외실험장치탑재용 카고탑재(5/9 ~ 5/14), 카고탑재 후 점검(5/18 ~ 5/23), 비가압 보급 캐리어에 탑재(5/25 ~ 5/28)[6]
이와 같은 절차를 거친 다음, 추진계통과 전기계통의 점검(6/25 ~ 7/22), 추진제 충전(7/28 ~ 8/10)을 마치고, 8월 18일 다네가시마 우주 센터에 반입하여 조립 후 시험 결과를 거쳐, 8월 21일에 HTV-1이 제조업체로부터 납품되었다.[7] 그 후 HTV·페이로드 분리부 결합(8/21 ~ 8/22), 페어링 장착(8/23 ~ 8/24), 대형 로켓 조립동으로 이동(8/30)하여 8월 31일 H-IIB 로켓과 결합되었다.[7]
9월 3일부터 9월 4일까지 발사하기 직전, 마지막으로 실험시료와 같은 화물들을 가압 보급 캐리어에 실음으로써 발사를 위한 준비를 마쳤다.[8]
H-IIB 로켓의 시험
편집HTV-1의 발사에는 H-IIB의 첫 기체가 사용되었다.
발사하기 전, 실제기체형 탱크스테이지 연소시험(CFT)를 두 번 거쳤다. 첫 번째의 실험은 2009년 3월 27일에 10초간 연소하는 것으로 예정되어 있었는데, 사전에 실행한 극저온점검에서 냉각수공급이상현상이 일어난 것이 확인되어 연기되었다.[9] 냉각수공급이상현상이 일어난 원인을 찾아본 결과 냉각수를 공급하는 밸브(수동밸브)가 잠겨있던 것으로 판명[10]되어 4월 1일에 연소시험을 재개할 수 있도록 했으나, 연소시험 당일 방소화계설비배관에서 누수 현상이 일어나 연소시험이 다시 연기되었다.[11] 그러고나서 다음 날인 4월 2일 14시 00분에 첫 번째 CFT가 무사히 종료되었다.[12]
이어진 두 번째 실험은 4월 20일에 150초간 연소하는 것으로 예정되어 있었다.[13] 그러나 기상 악화가 예상되어 22일로 연기되었고, 22일 13시 00분에 두 번째 CFT가 종료되었다.[14]
7월 11일에는 H-IIB의 지상종합검사를 실시했다.[15]
발사부터 국제우주정거장 랑데부까지
편집



2009년 7월 8일, HTV-1이 9월 11일에 발사하고 9월 12일부터 9월 30일까지 비행할 것이라 발표되었다.[16]
당초부터 계획되어있던 2009년 9월 11일 02시 01분 46초(JST, 이하 전부 JST)에 다네가시마 우주 센터 제2발사대에서 HTV-1을 탑재한 H-IIB가 발사되었다.[17][18] 발사로부터 15분 10초 후 HTV-1이 분리되었다.[18] 원지점 고도 299.9km(300.0 km±2km), 근지점 고도 199.8 km(200.0 km±10km), 궤도 경사각 51.69°(51.67°±0.15°)으로 HTV-1을 궤도에 안착시켰다.(괄호 안의 수치는 계획 상 수치)[18]
비행 1일차에는 궤도에 진입한 후엔 HTV의 서브 시스템이 자동으로 작동하기 시작했고, 자세 제어, 기체 이상 점검, HTV 운용 통제실과 통신을 시작하고 랑데부용 궤도 제어가 시작되었다.[2]
비행 3일차에는 충돌 회피 운용(Collision Avoidance Maneuver: CAM)과 같은 HTV의 운용 검증이 실시되었다. 다양한 검증을 통과한 이후 비행 6일차에 국제우주정거장 임무 관리 희의(Mission Management Team: MMT)에서 HTV-1의 국제우주정거장 최종 접근 운용이 승인 되었다.[19]
비행 7일차인 9월 16일 09시 04분,[20] 비행 8일차인 9월 17일 18시 26분, 21시 28분[21]에 고도 조정 매뉴버를 실시하여, 국제우주정거장 후방 5km인 접근개시점(Approach Initiainon: AI)에 도착하여 국제우주정거장에 대해 상대정지 상태에 돌입했다.
비행 9일차인 9월 18일 00시 31분에 접근개시점을 이탈하여 국제우주정거장을 향한 접근을 재개했다. GPS 상대 항법으로 국제우주정거장의 하부 500m 지점인 R바 개시점(R-bar Initiation: RI)으로 이동하여 01시 38분에 도착했다.[22] 이후 랑데부 센서(Rendezvous Sensor:RVS)에서 조사한 레이저 광선을 키모 모듈 선내 실험실 하부에 설치된 반사기에 반사시키는 방법으로 위치를 확인하면서 1~10m/s정도의 속도로 국제우주정거장에 접근했다.[2] 01시 48분, 국제우주정거장 하부 300m 지점 홀드포인트에서 자동 정지하고 긴급시 충돌 회피 기동 차원에서 HTV-1의 요(Yaw)축을 기준으로 180도 돌렸다.[2][23] 이 상태에서 9번 추진기의 주입기 온도가 상한에 가깝게 오르는 현상이 발생하여, 원격조작으로 주계(主系)와 용장계(冗長系) 교대로 전환하며 비행을 계속했다.[24] 추진기는 예정된 횟수만큼 작동했기에 온도 상승 현상이 일어난 것은 예상 밖이였다고 한다.[25]
같은 날 02시 55분 홀드포인트에서 출발하여, 03시 44분 국제우주정거장 하부 30m 지점의 파킹포인트에 자동 정지했다.[26] 04시 05분 버씽포인트를 출발하여, 04시 27분, 국제우주정거장 하부 10m 버씽포인트에 도착하여, 국제우주정거장에 대한 상대 정지가 확인되자 자동으로 추진기를 정지시켰다.[27][28] 국제우주정거장 최종 도킹 절차 중 긴급시엔 국제우주정거장 크루원이 탑승원용 명령 패널(HCP)에서 접근의 일시중지나 후퇴, 접근 중단과 같은 명령을 내려 HTV를 제어할 수 있었으나,[2] 이런 기능은 기능 시험에서만 사용되었다.[24]
04시 51분, 니콜 스콧이 캐나다암2를 이용해 HTV-1을 포획하여, 국제우주정거장과 완전히 고정시켰다.[29] HTV가 포획되기 직전 국제우주정거장에 대한 상대속도가 2mm/s 였는데 이에 대해 니콜 스콧은 "자유롭게 떠다니는 물체를 잡는 것이라고 생각되지 않을 정도로 멈춰있어 보였다"라고 후일담을 남겼다.[24]
06시 41분, HTV-1의 국제우주정거장 도킹 작업이 시작되어 07시 26분, 하모니 모듈의 공통 정박 장치(CBM)와 도킹했다.[30][31] 로봇 팔을 이용해 우주선에 도킹하는 방식(캡쳐·버씽 방식)이 세계 최초로 이용된 사례이기도 하다.[24]
또한 캐나다암2를 조작했던 스톳이 첫 번째 HTV의 성공을 축하하는 의미에서 쓰쿠바 우주 센터에 초밥을 선물했다고 한다.[32] 서프라이즈였기에, 관제실을 감도는 긴장의 기운이 그제서야 풀렸다고 한다.[32]



도킹 중의 작업
편집



비행 9일차인 9월 18일 09시 36분, 하모니 쪽 해치를 열어, 엑스퍼디션 20의 크루가 하모니 쪽 도킹포트의 정비를 실시했다.[2] 10시 49분경 작업을 끝내 국제우주정거장에 다시 도킹했다.[33]
비행 10일차인 9월 19일 03시 23분, 가압 보급 캐리어의 해치를 열어, 순환 팬 유닛으로 하모니의 공기를 환기시켰다.[2] 또한 03시 25분, 국제우주정거장 크루가 HTV-1의 가압부에 들어가,[34] 가압부의 공기 검사, 긴급절차서 배치, 소화품, 산소 마스크 등을 장착했다.[34]
비행 13일차, 가압 보급 캐리어 내부의 탑재품의 수송작업이 본격적으로 시작되었다.[35]
비행 14일차인 9월 23일 06시 06분, 캐나다암2를 이용해 선외실험장치탑재용 팔레트를 비가압 보급 캐리어에서 꺼낸 후, 20시 13분 캐나다암2에서 키보 모듈의 로봇 팔(JEM-RMS)으로 옮겨 22시 33분에 선외실험 플랫폼에 선외실험장치탑재용 팔레트를 장착했다.[35]
비행 15일차인 9월 24일 18시 21분, 로봇 팔을 이용해 HREP를 선외실험장치탑재용 파레트에서 꺼내, 20시 15분에 선외실험 플랫폼 장치교환기구(EFU) 6번에 장착했다.[36] 23시 23분엔 SMILES를 로봇 팔로 꺼내 EFU 3번에 장착했다.[36]
비행 16일차인 9월 25일 18시 07분, 사용 중지된 선외실험장치탑재용 팔레트를 선외실험 플랫폼에서 뜯어내, 키보 모듈 로봇 팔에서 캐나다암2로 옮기고, 22시 20분 HTV의 비가압 보급 캐리어에 실었다.[37]
비행 20일차엔 가압 보급 캐리어에 탑재되어있던 물자의 반출작업이 전부 종료도어, 이후 국제우주정거장에서 필요 없어진 물건들을 HTV 안에 적재했다.[38]
국제우주정거장의 승무원
편집HTV-1이 국제우주정거장에 도착할 때는 엑스퍼디션 20의 멤버들이 있었다.
- 겐나디 파달카 : 선장
- 마이클 바랫
- 니콜 스톳
- 프랑크 디 빈
- 로만 로마네코
- 로버트 서스크
HTV-1이 국제우주정거장을 떠날 때는 엑스퍼디션 21의 멤버들이 있었다.
- 프랑크 디 빈 : 선장, 엑스퍼디션 20에 이어서 탑승
- 로만 로마네코: 엑스퍼디션 20에 이어서 탑승
- 로버트 서스크: 엑스퍼디션 20에 이어서 탑승
- 맥심 수라예브
- 제프레이 윌리엄스
- 니콜 스톳: 엑스퍼디션 20에 이어서 탑승
또한 HTV-1가 국제우주정거장에 도킹되어 있는 동안 기 랄리베르테가 국제우주정거장에 들렸다.
HTV-1의 분리와 대기권 재돌입
편집

엑스퍼디션 21의 크루들은 HTV를 분리하기 전, HTV가 가져온 화재경보기와 가압 보급 캐리어 내부의 형광등을 떼어내는 작업을 했다.[39] 형광등은 국제우주정거장이 사용하는 형광등과 같은 부품이기 때문에 예비 부속품으로 사용했고, 화재경보기는 앞으로 발사될 HTV에서 재사용하기 위해 떼어내 보관했다.[39]
HTV-1의 가압 보급 캐리어에 폐기품을 싣는 과정은 10월 29일까지 완료되어, 728kg의 폐기물자와 896kg의 빈 랙, 총 1,624kg을 실었다.[5]
10월 30일 02시 32분에 가압 보급 캐리어의 해치를 닫았다.[39] 그리고 나서 도킹포트의 배선 케이블을 끊고, 모듈 간 통풍 환기(IMV)를 정지했다.[2]
캐나다암2에 의해 국제우주정거장으로부터 분리되는 것은 10월 30일 22시 30분, 최종적으로 캐나다암2로부터 분리될 시각은 10월 31일 01시 05분 경으로 예정되어 있었지만, 예정대로 그 시각에 분리할 경우 우주 쓰레기(코스모스 2421호)가 HTV-1에 접근 및 충돌 할 가능성이 있다고 판단되어 분리 작업을 90분 늦췄다.[5][40] 국제우주정거장에 직접적으로 충돌하는 것은 아니였기에 국제우주정거장의 궤도 변경은 없었다.
10월 31일 00시 02분, HTV-1이 캐나다암2에 의해 국제우주정거장과 분리되었다.[41] 캐나다암2를 이용해 방출 포인트(국제우주정거장 하부 12m)까지 옮겨 태평양 상공을 지나던 10월 31일 02시 32분에 HTV-1이 최종적으로 국제우주정거장과 분리되었다.[42]
10월 31일 02시 38분, 국제우주정거장 근방에서 이탈하기 위해 분사를 시작했다.[42]
11월 1일 09시 00분, 3개의 CPU가 전부 에러를 일으키는 현상이 일어나, 궤도이탈 매뉴버를 실시할 수 없게 되었으나, 모든 CPU를 리셋하고, 나아가 항법 유도 제어계를 재설정함으로서, 20시 45분에 복구되었다.[5]
그리고 난 후 궤도이탈 매뉴버를 11월 1일 23시 55분(8분간), 11월 2일 01시 25분(9분간), 11월 2일 05시 53분(8분간) 총 세번 작동시켰다.[5] 세 번째 매뉴버를 작동 시킨후의 궤도는 335×56km였으며,[5] 11월 2일 06시 26분경, 뉴질랜드 상공 120km에서 대기권에 재돌입하여 임무를 종료했다.[43]
본체의 대부분은 대기와의 마찰열로 인해 연소했으나, 타고 남은 일부가 06시 38분부터 06시 58분 사이 뉴질랜드 동쪽 남태평양(스페이스크래프트 세메터리)에 낙하했다고 추정된다.[5]
| 날짜 | 시각 | 내용 | 結果 |
|---|---|---|---|
| 2009년 9월 11일 | 02시 01분 | H-IIB 로켓 1호기 발사 | 성공 |
| 02시 42분 | 2축 자세 확립 | 성공 | |
| 03시 16분 | 3축 자세 확립 | 성공 | |
| 09시 33분 ~ 11시 49분 | 랑데부용 궤도 조정 매뉴버 실시 | 성공 | |
| 9월 12일 | 10시 12분 ~ 16시 34분 | 운용 검증 시험 실시 | 성공 |
| 9월 15일 | - | 최종 접근 운용 승인 판단 | 승인 |
| 9월 16일 | 09시 04분 | 첫 번째 고도 조정 매뉴버 실시 | 성공 |
| 9월 17일 | 22시 59분 | 접근개시점 (국제우주정거장의 후방 5km 지점)에 도착 | 성공 |
| 9월 18일 | 01시 38분 | R바 개시점 (국제우주정거장의 하부 500m 지점)에 도착 | 성공 |
| 01시 48분 | 홀드포인트 (국제우주정거장의 하부 300m 지점)에 도착 | 성공 | |
| 02시 55분 ~ 03시 44분 | 파킹포인트 (국제우주정거장의 하부 30m 지점)으로 이동 | 성공 | |
| 04시 05분 ~ 04시 27분 | 버씽포인트 (국제우주정거장의 하부 10m 지점)으로 이동 | 성공 | |
| 06시 41분 ~ 10시 49분 | 국제우주정거장에 도킹 작업 실시 | 성공 | |
| 9월 21일 | - | 가압 보급 캐리어 내 탑재품 반출 개시 | - |
| 9월 23일 | 22시 33분 | 선외실험장치탑재용 팔레트를 선외 실험 플랫폼에 설치 | 성공 |
| 10월 20일 | - | 가압 보급 캐리어 내 탑재품 반출 완료 | - |
| 10월 30일 | 02시 32분 | 가압부 해치 폐쇄 | - |
| 10월 31일 | 00시 02분 | 캐나다암2를 통해 국제우주정거장으로부터 분리, 계류시간: 42일 16시간 35분 | 성공 |
| 10월 31일 | 02시 32분 | 캐나다암2에서 분리 및 국제우주정거장 이탈 | 성공 |
| - | - | 첫 번째 궤도 이탈 매뉴버 실시 | 성공 |
| 11월 2일 | 01시 25분 ~ 01시 34분 | 두 번째 궤도 이탈 매뉴버 실시 | 성공 |
| 11월 2일 | 05시 53분 ~ 06시 01분 | 세 번째 궤도 이탈 매뉴버 실시 | 성공 |
| 11월 2일 | 06시 26분경 | 대기권 돌입, 임무 종료 | 성공 |
임무에 대한 평가
편집임무이 종료된 뒤 2010년 9월 15일, 우주개발위원회로부터 임무에 대한 평가를 하라는 지시가 내려와, JAXA는 우주개발위원회 추진부에서 우주정거장 보급기 기술 실증기 프로젝트의 평가(성과, 성공, 실패, 효율성 등에 대한 분석)를 진행했다.[44] 성과에 대해서는 결과, 효과, 파급 효과의 3개로 분류하고 평가되었다.
성과
편집결과
편집예정했던 비행계획이 모두 성공하고, 임무 성공 기준에 따라 최소한의 성공, 완전한 성공을 달성했다.[45] 또한,
- 실제 운용 결과에 근거해 재평가한 결과, 히터가 소비하는 전력을 줄일 가능성이 나타났다.
- H-IIB의 인터페이스 조건을 0.3톤 낮출 수 있었다.
- 설계된 성능과 달리 고도의 랑데뷰 요구에도 유연히 대응할 수 있었고, 계류기간을 연장하고 폐기품을 탑재하는 등, 운용의 유연성을 확대할 전망을 얻었다.
- 발사환경에 대해 자세히 계측하고. 화물 적재 환경 조건을 우주왕복선 수준까지 완화할 수 있었다.
로서, 추가적인 성공을 한 것으로 평가된다.[45]
이외에도 일본 정부의 요구조건과 JAXA의 "유인 우주 환경 이용 임무 본부 사업 계획서"의 요규를 모두 달성했다고 평가된다.[45]
효과
편집이번 HTV-1 임무가 성공함으로서, 국제우주정거장에 대한 일본의 보급 의무를 이행했고, HTV는 국제우주정거장 유지에 필수불가결한 보급 수단이 되었다.[45]
또한 HTV는 인공위성, 로켓, 우주스테이션의 기술을 통합한 일본 최초의 유인 시설 대응 수송기인 만큼, 일본의 우주개발기술유지·발전 및 인재 육성에 기여하게 되었다.[45]
파급 효과
편집
HTV-1을 이용해 세계최초로 캡쳐방식을 이용한 도킹(버씽)을 실증하고, 이 캡쳐·버씽방식을 미국 상업용 궤도 운송 서비스(COTS/CRS)가 채용했다.[45] 게다가 당시 개발 중이였던 시그너스가 HTV와 같은 통신기기(PROX)를 미쯔비시로부터 구입했다.(9대 분, 약 60억엔)[45]
대중매체에서도 HTV-1의 개발에 참여한 기업들이 개발 실적을 선전하는데 HTV-1을 이용했다.[45]
경제 파급 효과로는 HTV의 파급률이 2.53이였으며 이를 계산해본 결과 약 1568억엔 정도 나왔다고 한다.[45]
운용 중 발생한 문제에 대한 분석
편집설계, 제조과정의 실수도 없었기에 확실한 운용을 할 수 있었다고 평가 된다.[46] 사용 불능이 될 정도의 큰 고장은 일어나지 않았지만, 운용 중 여러 가지 문제가 발생했다.[46]
| 문제 | 추정 원인 | 운용 당시의 대처 | 이후 대처 |
|---|---|---|---|
| HTV의 GPS 절대위치가 일시적으로 오차가 생겼다. | GPS 수신기 소프트웨어의 허점으로 12시간 이상 지나면 시간 오차가 늘어나, GPS 위성의 관측 데이터를 받지 않는 현상이 일어났다. | 12시간 간격으로 소프트웨어 리셋을 걸어, 오차의 증가를 막았다. | GPS 수신기의 소프트웨어를 수정했다. |
| 국제우주정거장의 하부 300m 지점인 홀드포인트에서 사용 빈도가 높았던 RCS 추진기 1개의 온도가 치솟아 설계상 최대 온도에 가깝게 올라갔다. | 분사 효율성이 과도하게 증가한 것, 너무 긴 배관의 영향으로 전방 RCS 추진기에 주입된 연료가 덜 혼합되면서 연소 온도가 치솟았다. | 최종 접근 절차에서 추진기를 계속 대체 추진기와 전환하면서 사용해, 허용 온도 내에서 유지했다. | 다시 진행한 RCS 추진기 연소실험에서 고온도에서도 안정적으로 작동하는 것을 확인하고 허용 온도 값을 상향시켰다. 센서도 고온에 내성이 있는 백금 온도 센서로 변경했다. 홀드포인트 변경(300m→250m)에 따른 연소 효율성을 감소시키고, 잠시 정지하여 대기하는 시간을 단축했다. |
| 국제우주정거장과 도킹을 해제한 후, GCC의 메인 CPU 3개에 에러가 발생하고, 프리징되는 현상이 일어났다. 그 결과 비상용 CPU로 자동 전환되었다. | GPS 주를 갱신할 때, GPS 수신기에서 출력하는 신호가 비정기적으로 갱신되면서 시간 보정 처리가 제대로 이루어지지 않았고, 이 때문에 장시간 동안 오차가 지속되어 CPU에 에러가 발생했다. | 랑데부 소프트웨어를 발사 당시로 되돌려 복구했다. | 랑데부 소프트웨어가 GPS 주의 오차를 감지할 경우 일정시간 동안 시간 보정 처리를 정지하도록 소프트웨어를 수정했다. |
프로젝트의 효율성에 대한 분석
편집1997년, 프로젝트 계획을 착수할 당시에는 키보 모듈이 조립 완료된 후 3개월 되는 시점인 2001년도에 HTV-1 발사할 것으로 계획했다.[46] 그러나 러시아의 서비스 모듈이 지연되어 발사되고, 컬럼비아 우주왕복선 공중분해 사고의 영향으로 인해 국제우주정거장의 조립 전체가 지연되자 키보 모듈의 조립 완료 시점이 2009년으로 밀려나면서 최종적으로 HTV-1 계획도 2009년 말로 연기되었다.[46] 초기 계획과 다르게 8년의 시간이 더 생긴 만큼, 이 개발 기간을 활용해 HTV의 안전성과 신뢰성을 더욱 높일 수 있었다.[46]
프로젝트를 착수할 당시인 1997년에는 총 개발 비용으로 280억엔이 책정되었으나, 당시에는 태양 전지가 없고, GPS는 국제우주정거장의 정보를 이용한다는 등 현재와 기능이 많이 달랐다.[46] 그러나 국제우주정거장에 접근하는 무인기를 개발한 적이 없다는 점과 1997년 4월에 일어난 프로그레스 M-34의 충돌사고로 인해 NASA가 안전장치의 추가를 요구했다.[46] 이러한 이유로 2002년엔 총 개발 비용이 394억엔까지 증가했다. 이후에도 해외 조달 부품의 가격 상승, 추가 검증 시험들으로 인해 2006년엔 총 개발 비용이 677억엔으로 설정되었다.[46] 추가적인 설계 변경이나 발사 연기가 있었지만 프로젝트 완료시 개발비는 677억엔을 초과하지 않아, 문부과학성독립행정법인평가위원회로부터 S 평가를 받기도 했다.[46] 1997년 당시 계획상 개발 예산보다 약 2.4배 증가했지만, 비슷한 시기 ESA에서 개발한 쥘 베른 ATV 또한 예산이 3.24배 증가하는 모습을 보였기 때문에 이는 타당한 결과하고 여겨졌다.[46]
HTV의 1톤 당 수송 비용은 47억엔으로 평가되었는데,[46] 쥘 베른 ATV의 약 58억엔(134엔/유로), 우주왕복선의 약 76억엔(94엔/달러)에 비해 우위성이 있다고 평가된다.[46]
수상
편집- 2009년 12월, 일본 과학기술정책연구소는 "고도의 안전성·신뢰성을 만족하는 우주 스테이션 보급기(HTV)의 기술 실증"에 대해서, HTV프로젝트팀의 호야 요시히코(프로젝트 매니저), 코야리 유키오(서브 매니저), 사사키 히로시(펑션 매니저)를 우수 연구원으로 뽑아, 과학 기술에 대한 상당한 기여 2009를 수여했다.[47]
- 2010년 4월, "HTV / H-IIB로켓의 개발"에 참여한 JAXA와 관련기업 11개사가 제39회일본산업기술대상문부과학대신상을 수상했다.[48]
- 2010년 9월, HTV-1 임무에 종사했던 HTV NASA/JAXA 합동 훈련 설비 팀과 HTV 지상운용 팀이 NASA로부터 표창을 받았다.[49]
같이 보기
편집각주
편집- ↑ 가 나 다 라 마 바 “HTV-1ミッション>HTV-1ミッションの目的”. JAXA. 2010년 10월 31일에 확인함.
- ↑ 가 나 다 라 마 바 사 아 자 차 “HTV-1 ミッションプレスキット” (PDF). JAXA. 2010년 10월 31일에 확인함.
- ↑ “HTV-1 Mission Press Kit” (PDF). JAXA. 2009년 9월 9일. 2009년 9월 11일에 확인함.
- ↑ “HTV技術実証機 与圧搭載品 (from the press briefing material)” (일본어). JAXA. 2009년 9월 11일에 확인함.
- ↑ 가 나 다 라 마 바 사 “宇宙ステーション補給機(HTV)技術実証機の国際宇宙ステーション(ISS)離脱及び再突入結果について” (PDF). JAXA. 2009년 11월 4일. 2010년 11월 1일에 확인함.
- ↑ 가 나 다 라 마 虎野吉彦 (2009년 6월 10일). “宇宙ステーション補給機(HTV)技術実証機開発状況について” (PDF). JAXA. 2010년 10월 31일에 확인함.
- ↑ 가 나 “宇宙ステーション補給機(HTV)技術実証機の打上げ準備状況について” (PDF). JAXA. 2009년 9월 2일. 2010년 10월 31일에 확인함.
- ↑ “HTV初号機、打上げに向けた準備を完了、打上げは9月11日午前2時01分に設定”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “H-IIBロケット第1段実機型タンクステージ燃焼試験(CFT)第1回目燃焼試験の延期について”. JAXA. 2009년 3월 27일. 2009년 8월 12일에 확인함.
- ↑ “H-IIBロケット第1段実機型タンクステージ燃焼試験(CFT)第1回目燃焼試験日について”. JAXA. 2009년 3월 30일. 2009년 8월 12일에 확인함.
- ↑ “H-IIBロケット第1段実機型タンクステージ燃焼試験(CFT)第1回目燃焼試験の中止について”. JAXA. 2009년 4월 1일. 2009년 8월 12일에 확인함.
- ↑ “第1回 H-IIBロケット第1段実機型タンクステージ燃焼試験(CFT)の結果について”. JAXA. 2009년 4월 2일. 2009년 8월 12일에 확인함.
- ↑ “第2回 H-IIBロケット第1段実機型タンクステージ燃焼試験(CFT)の実施について”. JAXA. 2009년 4월 17일. 2009년 8월 12일에 확인함.
- ↑ “第2回 H-IIBロケット第1段実機型タンクステージ燃焼試験(CFT)の結果について”. JAXA. 2009년 4월 22일. 2009년 8월 12일에 확인함.
- ↑ “H-IIBロケット地上総合試験(GTV)の結果について”. JAXA. 2009년 7월 11일. 2009년 8월 12일에 확인함.
- ↑ “H-IIBロケット試験機の打上げについて”. JAXA. 2010년 10월 31일에 확인함.
- ↑ Krebs, Gunter. “H2 Family”. 2009년 8월 11일에 확인함.
- ↑ 가 나 다 “H-IIBロケット試験機による宇宙ステーション補給機(HTV)技術実証機の打上げ結果について(速報)” (PDF). 2009년 9월 16일. 2009년 9월 16일에 확인함.
- ↑ “HTV技術実証機の最終接近運用にGo”. 2009년 9월 15일. 2009년 9월 15일에 확인함.
- ↑ “第1回高度調整マヌーバを実施しました”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “HTV技術実証機、ISSの後方5kmに到着”. JAXA. 2010년 11월 1일에 확인함.
- ↑ 宇宙ステーション補給機(HTV) > 最新情報「ISSへの接近を再開 (2009年09月18日)」「ISS下方500mに到着 (2009年09月18日)」
- ↑ 宇宙ステーション補給機(HTV) > 最新情報 「ISS下方300mに到着 (2009年09月18日)」
- ↑ 가 나 다 라 “第7章 宇宙ステーション補給機(HTV)技術実証機の飛行結果” (PDF). JAXA. 2018년 9월 28일에 원본 문서 (PDF)에서 보존된 문서. 2018년 9월 28일에 확인함.
- ↑ “平成21年宇宙開発委員会(第29回)議事録”. 文部科学省. 2013년 1월 27일에 원본 문서에서 보존된 문서. 2010년 11월 1일에 확인함.
- ↑ 宇宙ステーション補給機(HTV) > 最新情報 「ISS下方30mに到着 (2009年09月18日)」「ISS下方300mから出発 (2009年09月18日)」
- ↑ “ISS下方30mから出発”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “ISS下方10mに到着”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “HTV技術実証機、ISSのロボットアームによる把持成功”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “HTV技術実証機、ISSへの結合開始”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “HTV技術実証機、ISSに結合”. JAXA. 2010년 11월 1일에 확인함.
- ↑ 가 나 中村浩彦 (2011년 1월 28일). “HTV開けたらぬいぐるみ 宇宙飛行士にサプライズ返し”. 《asahi.com》. 2011년 1월 29일에 원본 문서에서 보존된 문서. 2011년 1월 28일에 확인함.
- ↑ 宇宙ステーション補給機(HTV) > 最新情報 「ハーモニー側のハッチ、オープン (2009年09月18日)」「HTV技術実証機、ISS結合完了 (2009年09月18日)」
- ↑ 가 나 “HTV技術実証機の補給キャリア与圧部ハッチオープン”. JAXA. 2010년 11월 1일에 확인함.
- ↑ 가 나 “HTV技術実証機の曝露パレット、移設作業完了”. JAXA. 2010년 11월 1일에 확인함.
- ↑ 가 나 “船外実験装置2台を「きぼう」船外実験プラットフォームに移設しました”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “曝露パレット、HTV補給キャリア非与圧部に収納完了”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “HTV技術実証機、搭載物の搬出作業完了”. JAXA. 2010년 11월 1일에 확인함.
- ↑ 가 나 다 “HTV技術実証機のハッチ閉鎖、ISSからの分離は今夜”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “HTV技術実証機の離脱時刻変更について”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “HTV技術実証機はISSから取り外されました”. JAXA. 2010년 11월 1일에 확인함.
- ↑ 가 나 “HTV技術実証機、ISSから離脱”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “HTV技術実証機は大気圏に再突入、ミッション終了”. JAXA. 2010년 11월 1일에 확인함.
- ↑ “宇宙開発に関する重要な研究開発の評価 宇宙ステーション補給機技術実証機(HTV1) プロジェクトの事後評価結果(案)” (PDF). 宇宙開発委員会 推進部会. 2010년 10월 18일. 2010년 12월 26일에 확인함.
- ↑ 가 나 다 라 마 바 사 아 자 HTVプロジェクトマネージャ虎野吉彦 (2010년 9월 21일). “宇宙ステーション補給機技術実証機(HTV1)プロジェクトに係る事後評価について(2)” (PDF). 宇宙航空研究開発機構 有人宇宙環境利用ミッション本部. 2010년 12월 26일에 확인함.[깨진 링크(과거 내용 찾기)]
- ↑ 가 나 다 라 마 바 사 아 자 차 카 타 파 HTVプロジェクトマネージャ虎野吉彦 (2010년 9월 21일). “宇宙ステーション補給機技術実証機(HTV1)プロジェクトに係る事後評価について(3)” (PDF). 宇宙航空研究開発機構 有人宇宙環境利用ミッション本部. 2010년 12월 26일에 확인함.[깨진 링크(과거 내용 찾기)]
- ↑ “報道発表 科学技術への顕著な貢献 2009(ナイスステップな研究者)” (PDF). 科学技術政策研究所. 2010년 12월 26일에 확인함.
- ↑ “日本産業技術大賞 過去の受賞 第31回~第36回”. 日刊工業新聞. 2010년 12월 26일에 확인함.
- ↑ “HTV-1ミッションで活躍したHTV NASA/JAXA合同訓練設備チームとHTV地上設備チームがNASAから表彰されました”. 科学技術政策研究所 きぼう広報・情報センター. 2010년 12월 26일에 확인함.
{kind=link}
참고 문헌
편집- HTV-1 ミッションプレスキット - JAXA
- 宇宙ステーション補給機(HTV)技術実証機の飛行結果 Archived 2018년 9월 28일 - 웨이백 머신 - JAXA
외부 링크
편집- HTV-1 -JAXA